Da bi se od tzv “raw” snimaka sa kamere dobila kvalitetna kolor fotografija nebeskog objekta potrebno je snimke obraditi u specijalizovanom programu. Ja koristim Pixinsight.
Program sadrži veliki broj specijalizovanih procesa i skripti. Tok obrade uglavnom se sastoji iz sledećih operacija:
– Preprocesing koji se sastoji iz više delova a koji od svih snimaka jednog nebeskog objekta daje jedan sabrani i obogaćeni snimak po svakom filteru.
– Kasnija obrada integrisanih snimaka obuhvata uklanjanje pozadinskih gradijenata, neželjene iluminacije, smanjenje šuma, izoštravanje kontrasta kod svetlijih površina, spajanje mono snimaka u kolor snimak, dodatne obrade kolor fotografije u vidu posebne obrade svetlih površina (objekata) i tamnih površina (pozadine), podešavanja boja, saturacije, osvetljenosti sve do publikovanja i notacije snimka.
Kako izgleda put od pojedinačnog snimka nekog nebeskog objekta do finalne slike pokušaću da objasnim na što jednostavnijem primeru. Uzmimo recimo maglinu M8 pod nazivom Laguna.
Najpre da kažem da je deklinacija ove magline ispod -20 stepeni a to znači da se sa moje lokacije vidi samo u odredjeno doba godine i to nisko na južnom delu horizonta a to opet znači da je vrlo ograničeno vreme snimanja (oko jedan sat pre i jedan sat posle prolaska kroz meridijan). Maksimana visina objekta je tada oko 20 stepeni iznad horizonta a poznato je da se zbog uticaja atmosfere u principu izbegavaju snimanja objekata visine ispod 30 stepeni jer će to rezultovati manje preciznim snimcima.
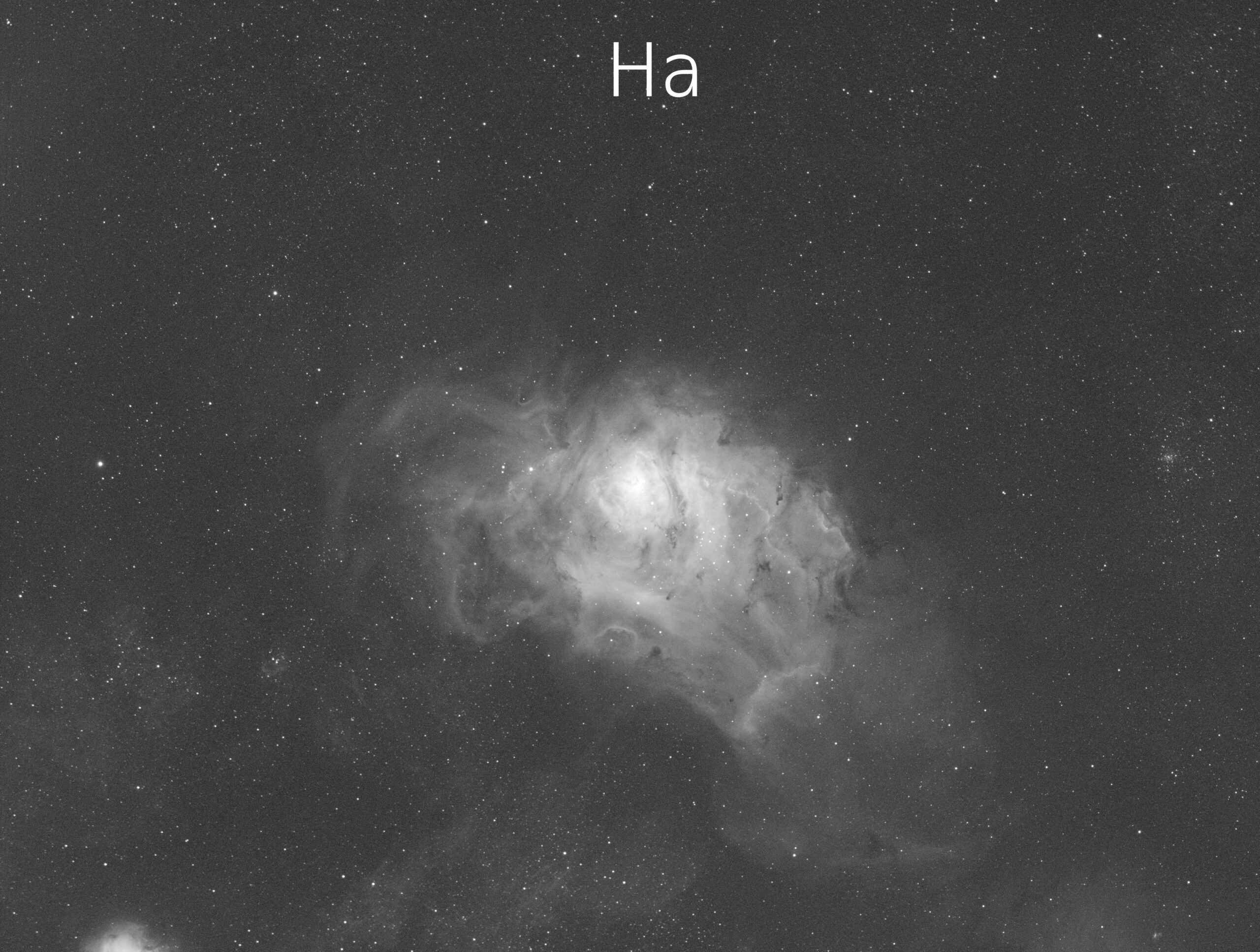
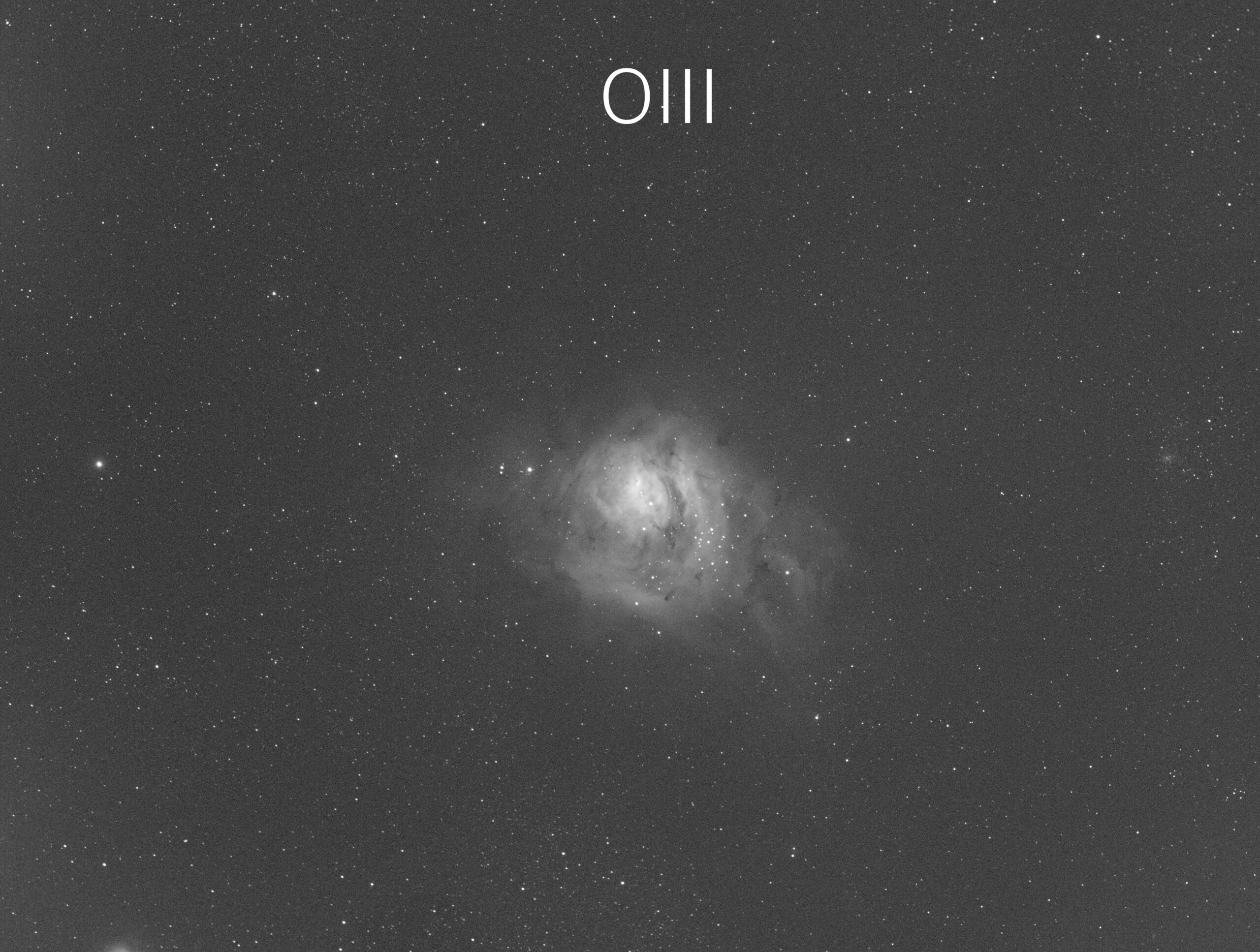
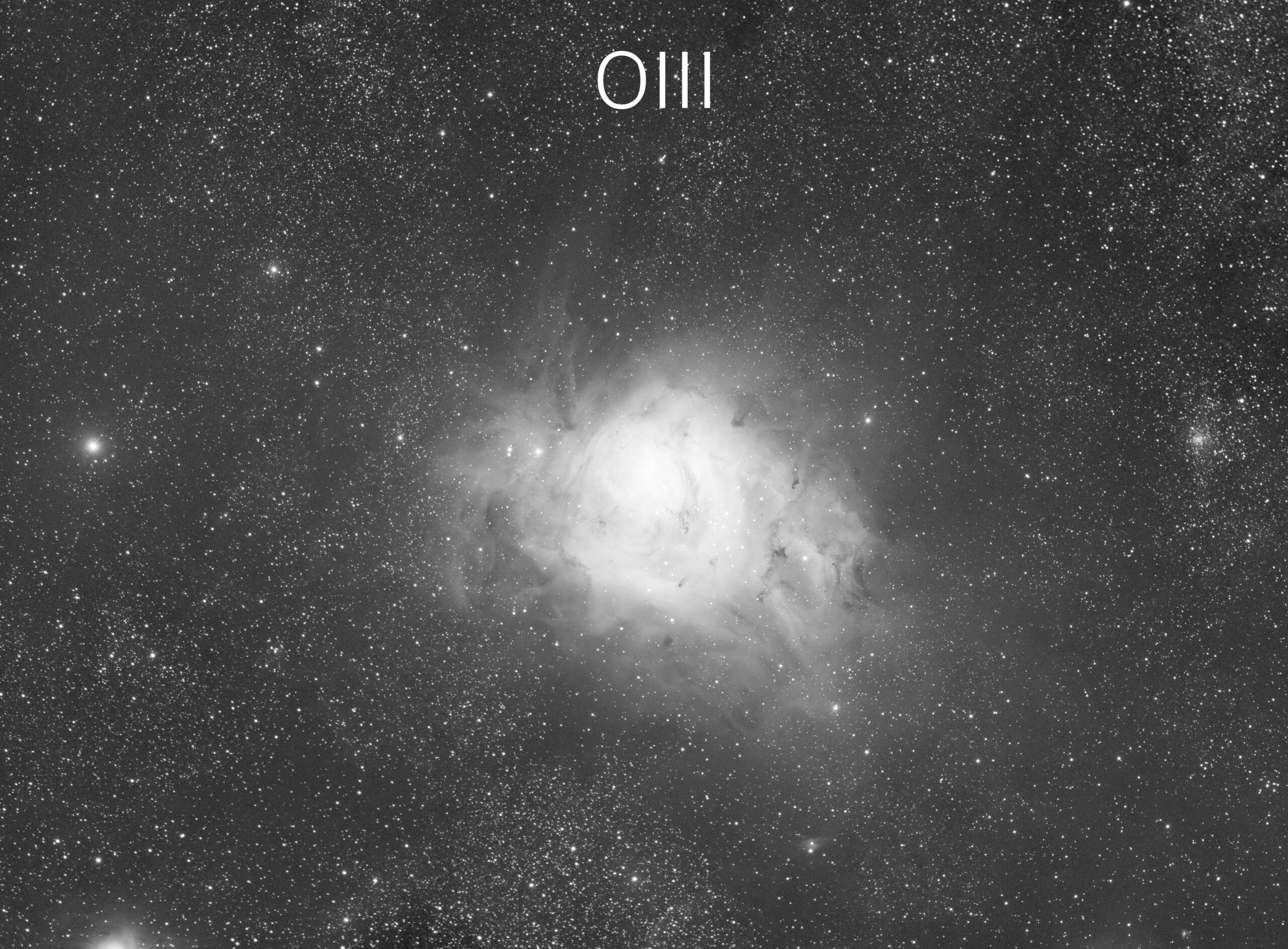
Svoju punu strukturu magline ispoljavaju na snimcima kroz uskopojasne filtere. U praksi da bi se dobile slike u boji obično se svakom filteru veštački dodeli jedna od tri osnovne boje. Tako se S2 filteru dodeli crvena boja, Ha filteru zelena i OIII filteru plava. U praksi se taj postupak naziva Hablova paleta jer na istom principu deluje i svemirski teleskop Hubble. Iako boje nisu prirodne, snimci omogućavaju uvid u izuzetne kontraste.
Ovako izgledaju pojedinačni snimci M8 kroz te filtere uz ekspoziciju od 5 minuta:

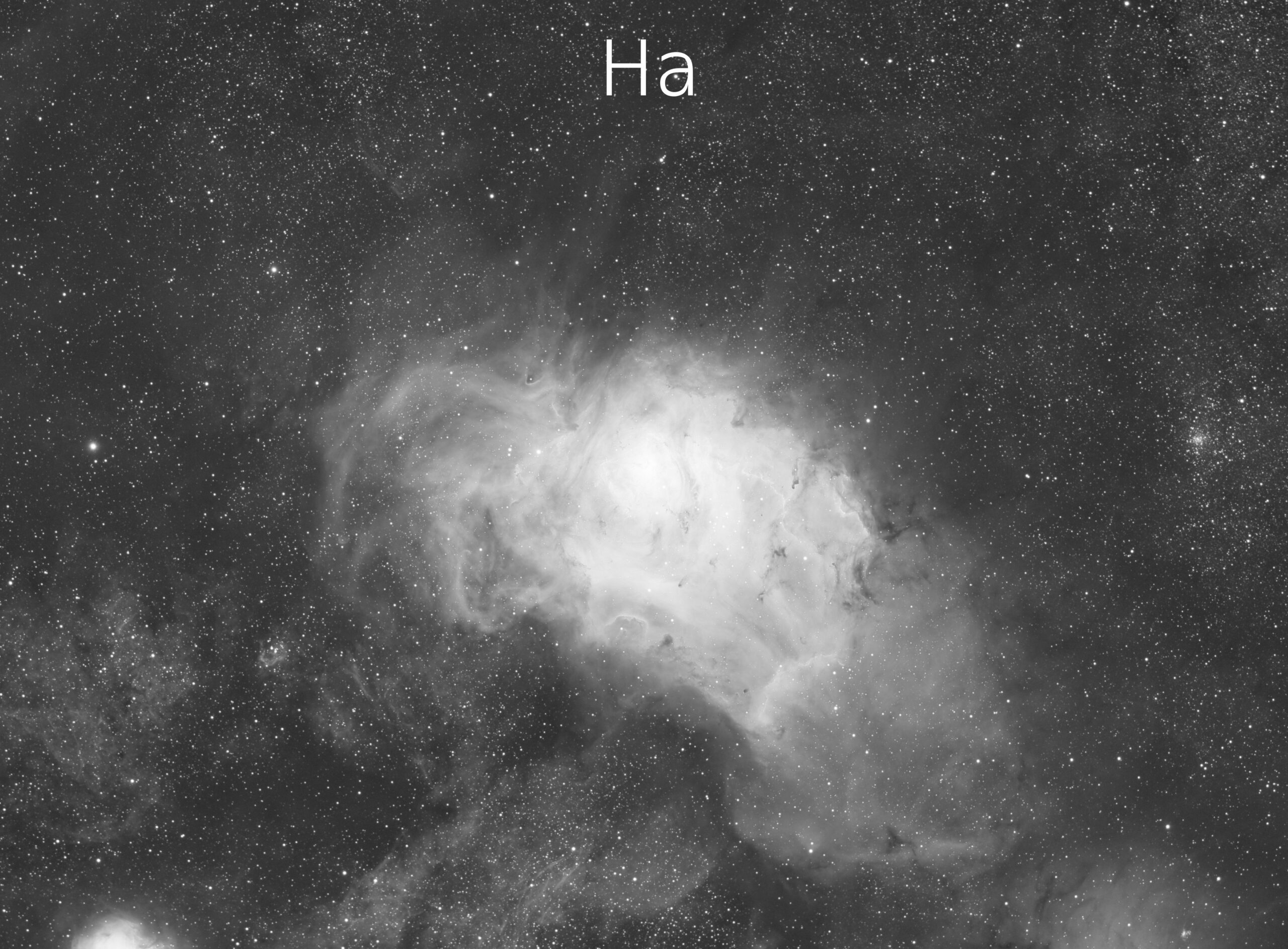
Veći broj ovakvih snimaka softverski se spaja, eliminišu se neželjeni gradijenti, maksimalno se smanjuju pozadinski šumovi i konačni pojedinačni snimci izgledaju ovako:

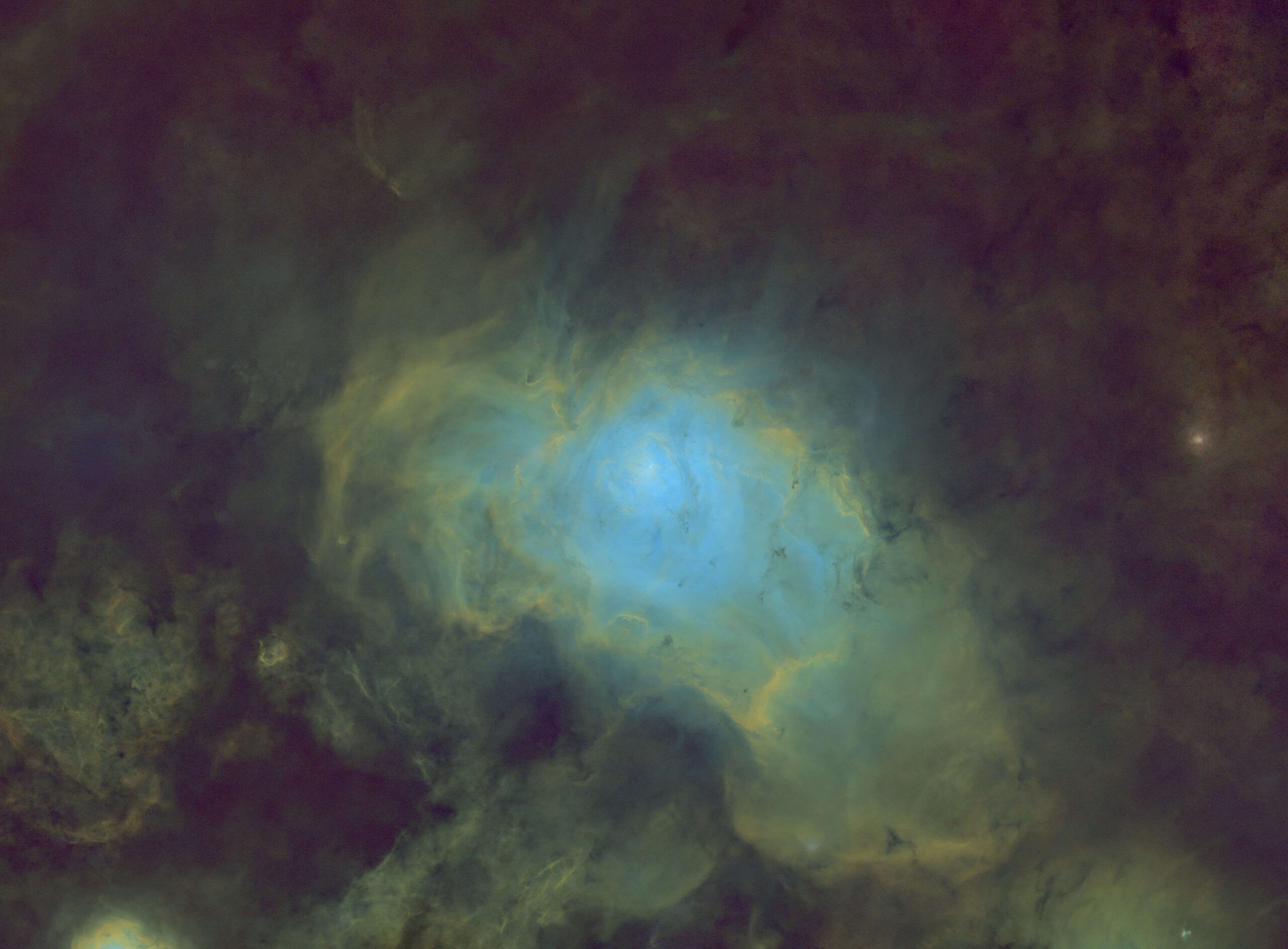
Nakon što se izjednači svetlosni intezitet snimaka pristupa se njihovom spajanju pri čemu se dobija prva slika u boji iz koje se odmah izdvaja snimak sa L komponentom:


Zatim se na kolor snimku vrši neutralizacija pozadine i kolor kalibracija, pa se iz takve slike eliminišu zvezde:

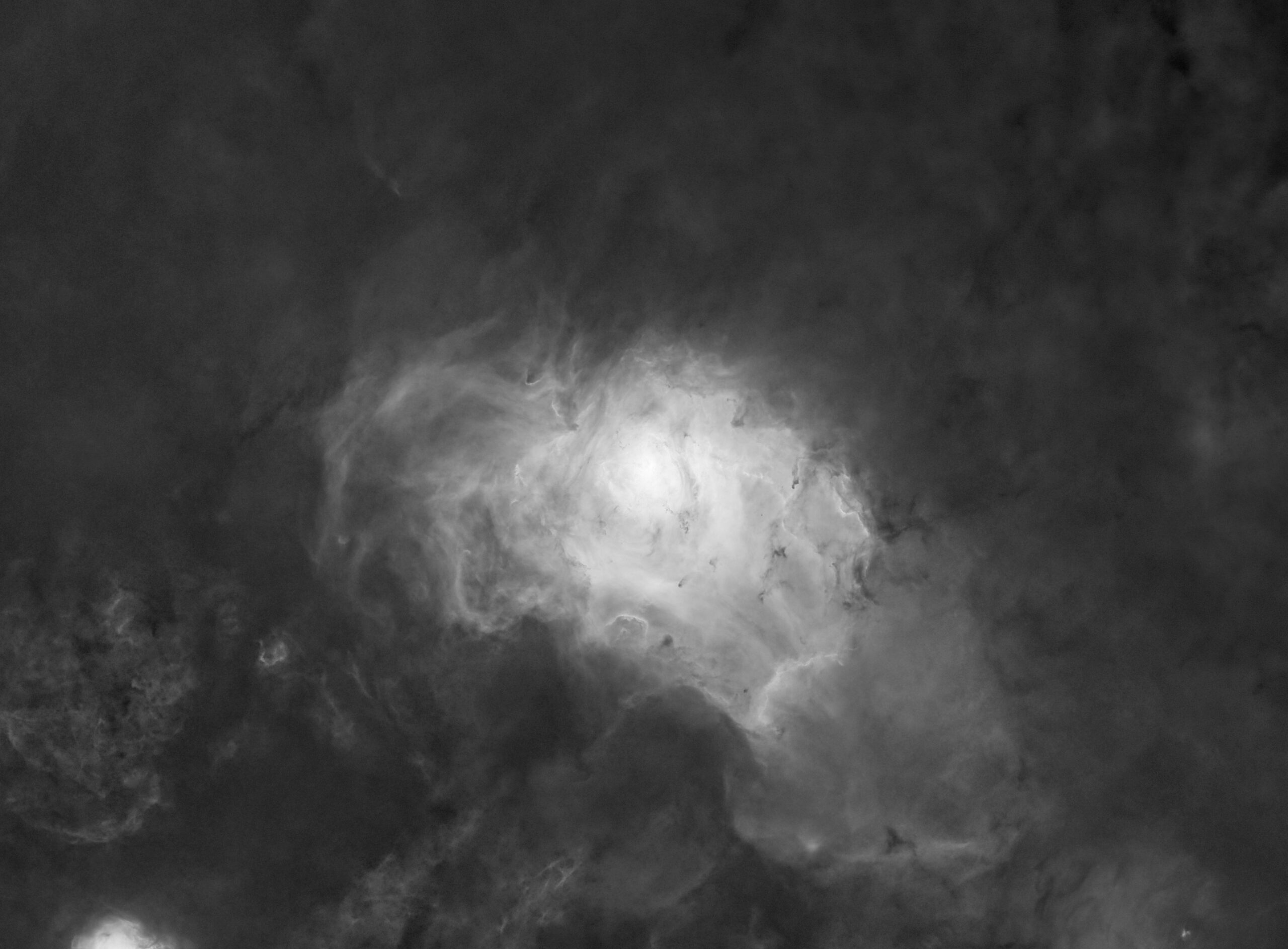
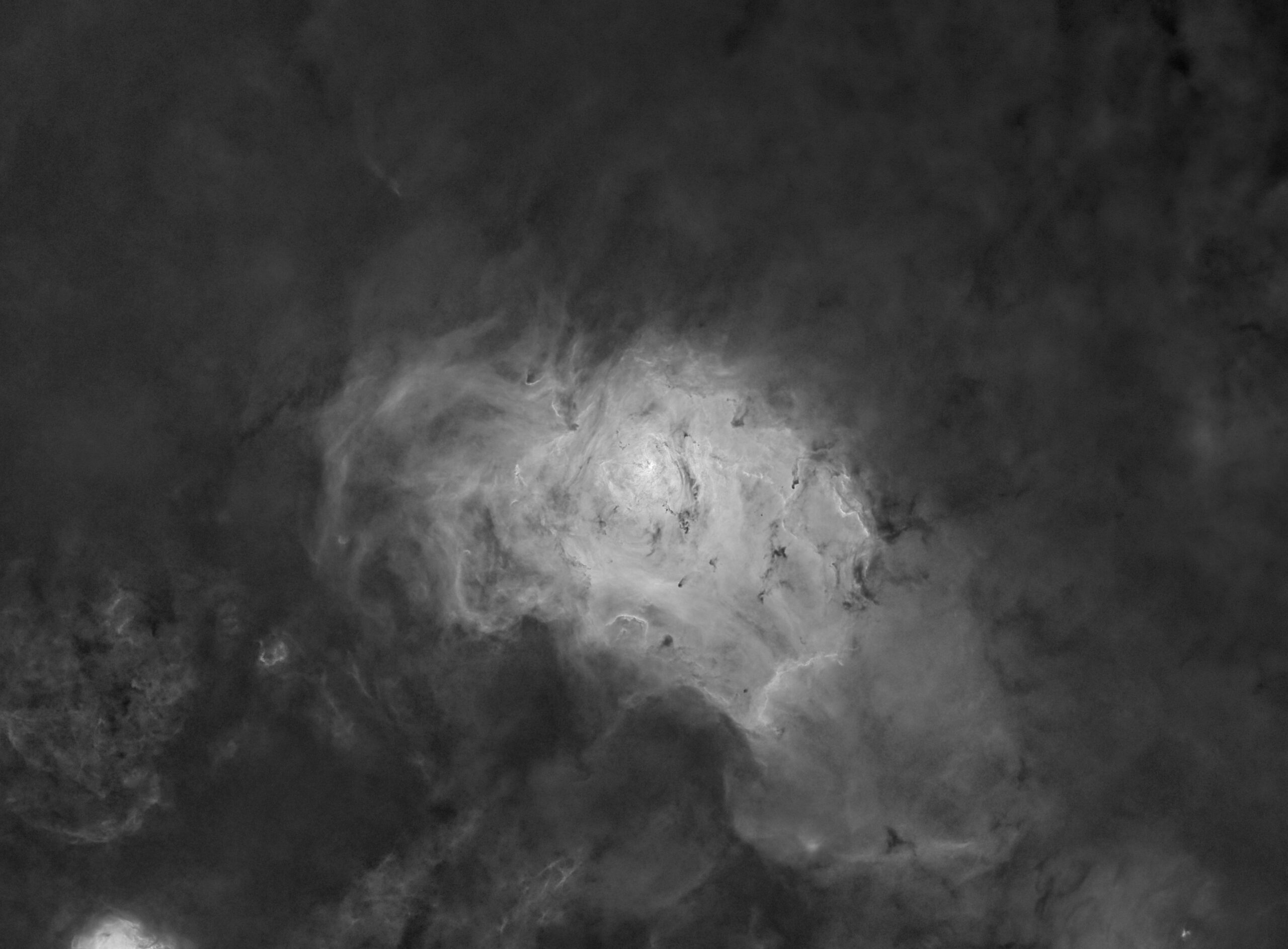
Prva slika je L komponenta sa koje su eliminisane zvezde, a druga je ista ta nakon zahtevnih intervencija gde se poboljšava kontrast i oštrina pojedinih karakterističnih detalja:
Poboljšan snimak L komponente bez zvezda dodaje u kolor snimak bez zvezda čime se drastično popravlja kvalitet snimka:
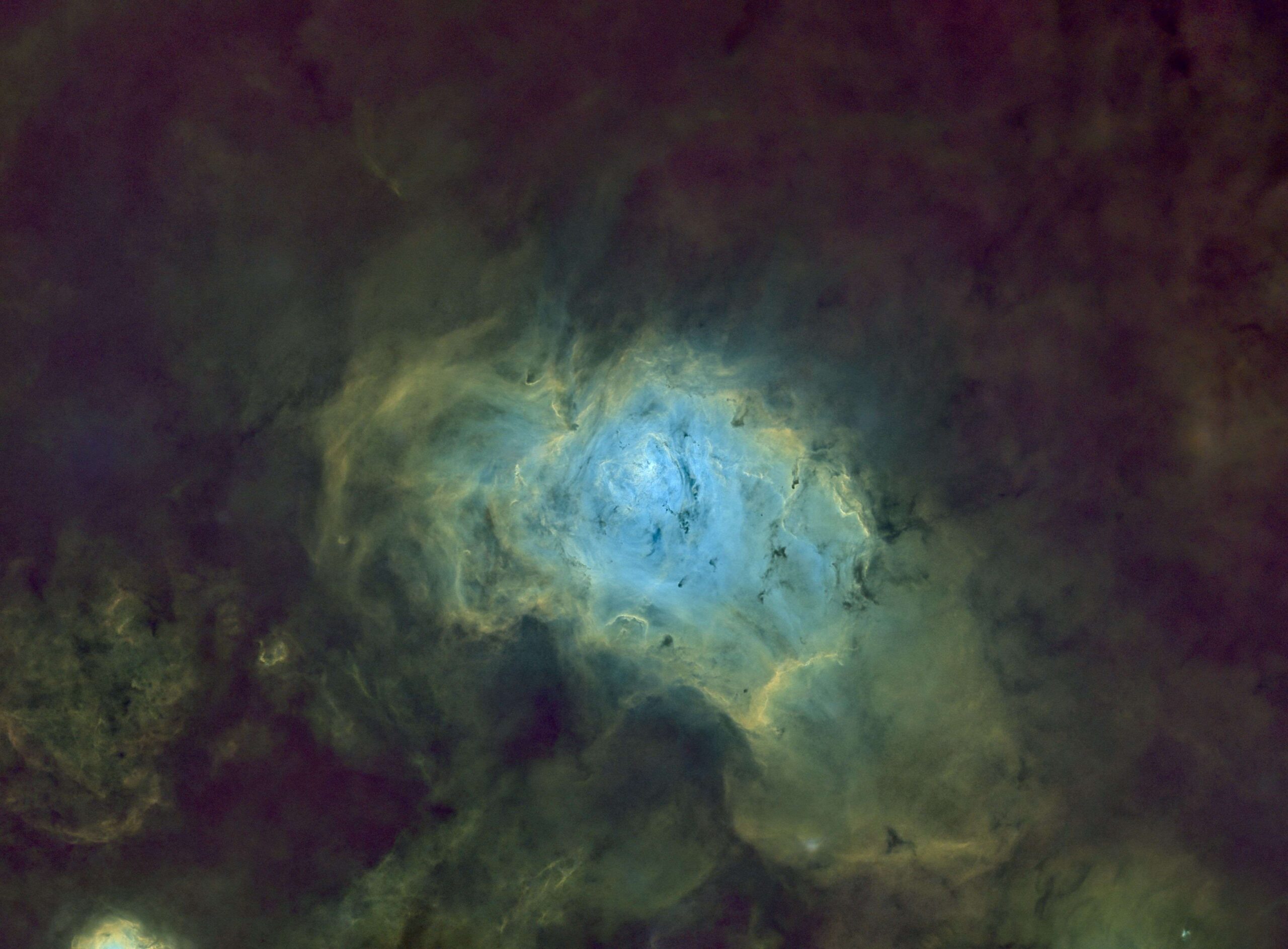
Slede dodatne operacije na takvom snimku kao što su podešavanje lokalnog histograma, dalje smanjenje šuma, podešavanje kontrasta i oštrine, saturacije i CIE komponenti pa konačna slika bez zvezda izgleda ovako:
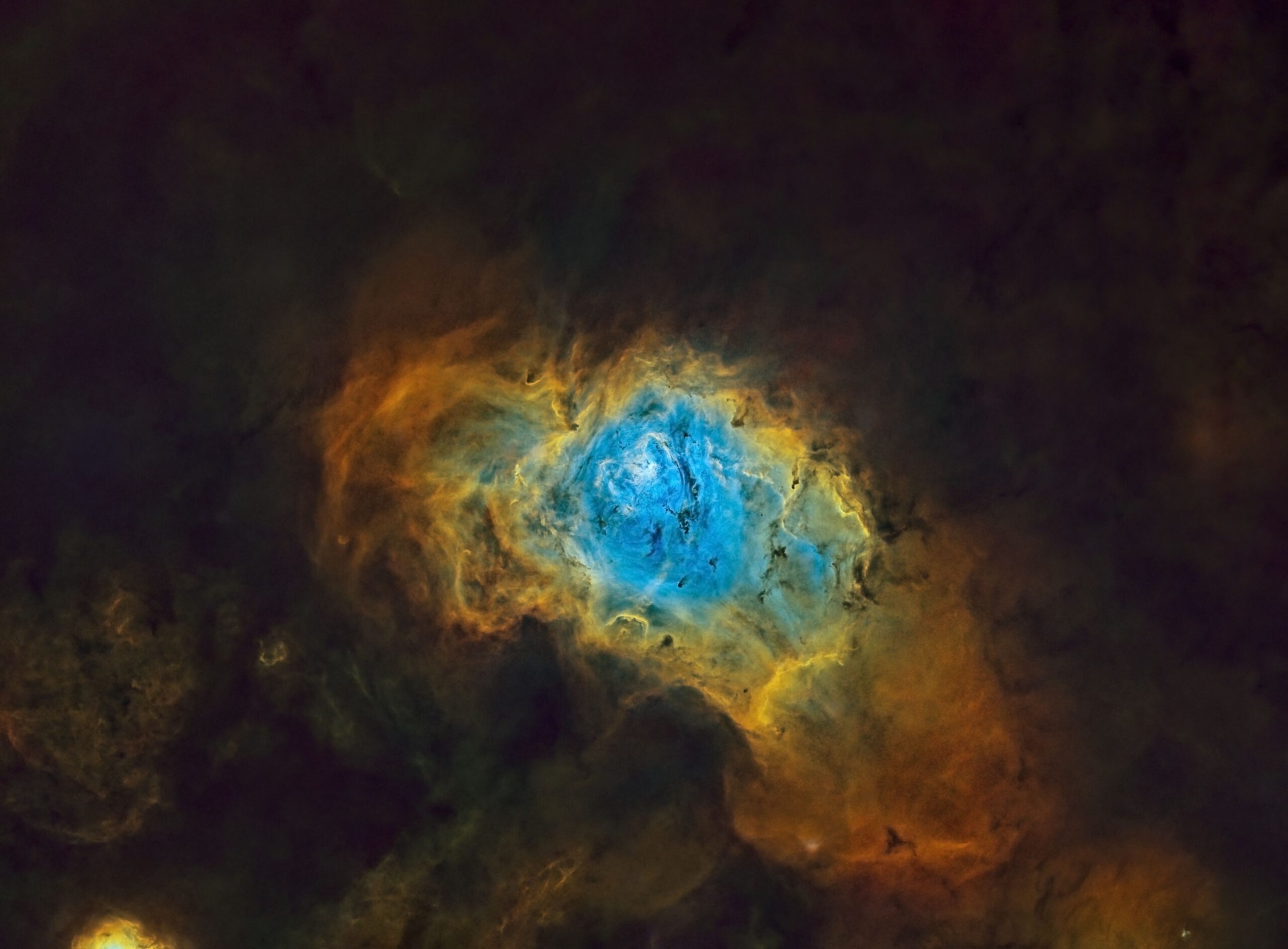
U medjuvremenu iz svakog pojedinačnog filter snimka uzimaju se zvezde pa se spajaju u zajednički kolor snimak zvezda. Sa druge strane radi se maska od L snimka zvezda da neka tačka koja je ustvari šum ne bude prepoznata kao zvezda kao i da izrazito sjajne zvezde ne zauzimaju površinu na snimku koji im ne pripada. Konačan snimak je ovaj a malo više o njemu na stranici M8 – Lagoon:
